| self | 您所在的位置:网站首页 › 传统cnn和vision transformer之间的区别 › self |
self
|
自注意力机制
在传统的CNN中,都是对感受野内部的事情进行关联后理解。 感受野实际上关乎了模型对全局信息的理解。 而本质上,感受野是一种特殊的注意力机制,也就是说感受野是一种受限的、具有特定参数的注意力。 之前的内容如DANet,则更加接近广义的注意力机制。 在这种机制的作用下,像素与像素间的内容会产生相互联系,通过注意力权重矩阵,对图像中全局的信息进行提取和理解。 而《attention is all your need》这篇文章中,提出了一种全新的注意力机制,其意义在于: 1. 从原理上解释了CNN和RNN的一般形式 2. 为NLP和CV的大一统模型建立的基础 3. 从后续的swin transformer的刷榜提供了理论和技术支撑 如果总结近10年的人工智能发展,除了alexnet之外,就当属transformer这篇文章。 序列到序列的模型目前所接触的图像任务,都是单一输入到单一输出的情况。 如果在复杂任务中,则会出现输入一个序列,输出一个序列的场景。
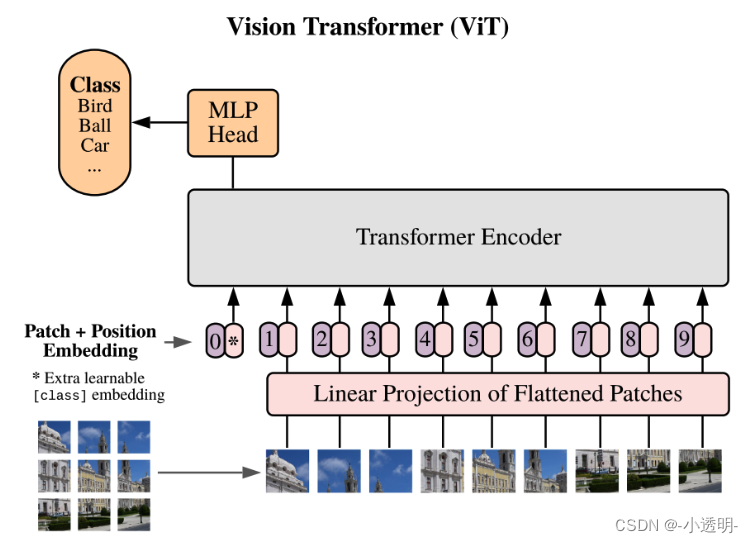
seq2seq模型中,主要是用于NLP领域,例如分词、词性判断、语义问答等等。 显然,一个单词就是一个输入,一句话就组成了一个序列。 在图像中,如何使用序列输入? 2020年经典论文Vision Transformer中,就将这个问题建模为了一种图像patch输入的序列化处理。
其中,一张图像被不重叠地切割成了若干个小块。所有小块按顺序连接起来,组成输入序列。 这也是图像与自然语言处理大一统的关键步骤。 seq2seq模型中天然要解决的问题输入序列中无法有效的沟通和交流,从而无法建立长效的序列间的通信机制,从而无法实现可靠的处理。 常规的对于序列输入的处理方法(如视频、多帧图像等等),一些常用的思路有什么? 1. 依次输入,依次输出 2. 合并成矩阵进行输入 3. RNN 显然,第一种方法缺少可靠性,因为无法沟通。 第二种方法不够灵活,因为需要固定长度输入。 第三种方法在此之前用的比较多,因为他能够充分沟通前后序列信息
**序列到序列模型的最终目的** seq2seq的最终目的在于,所输出的内容,都是充分考虑了其他序列中的内容所得到的。 一种通用的思路通用的思路就如同全连接
这里,就有attention出场了。 self-attention的基本过程
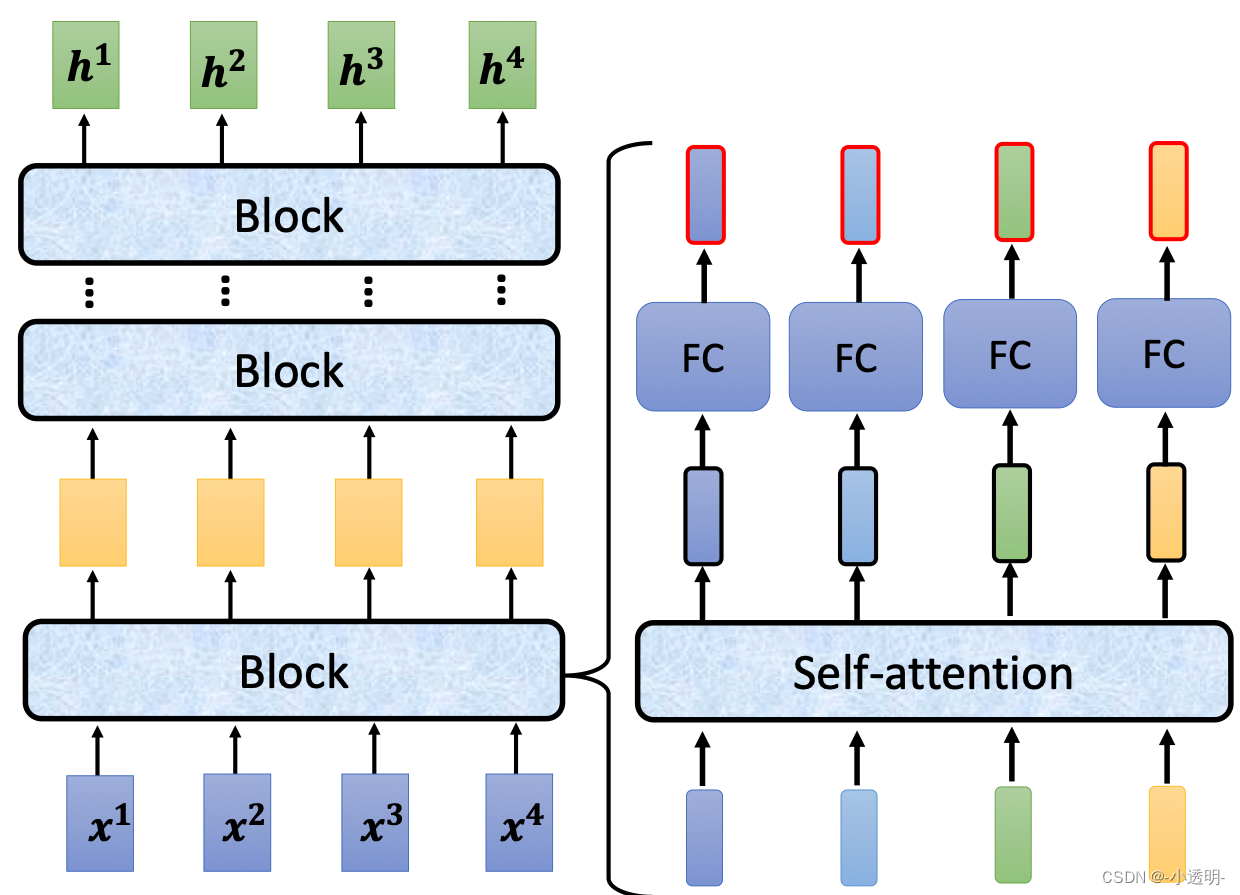
这些输出综合了所有序列的信息,具有更加广泛的全局性特征。 这些特征可以进而作为下一个attention模块的输入,逐级泛化,从而得到可靠的输出。 上述过程就是transformer的基本过程。transformer采用了6层encoder和decoder 与s2s不同的是:s2s的encoder和decoder是RNN网络,而transformer完全抛弃了RNN 对于self-attention模块,可以简单的视为一个这样的模块:
**自注意模块的两个过程:** 1. 计算序列间的相关性 2. 为每个输出加入不同的相关性权重  计算序列间的相关性 计算序列间的相关性
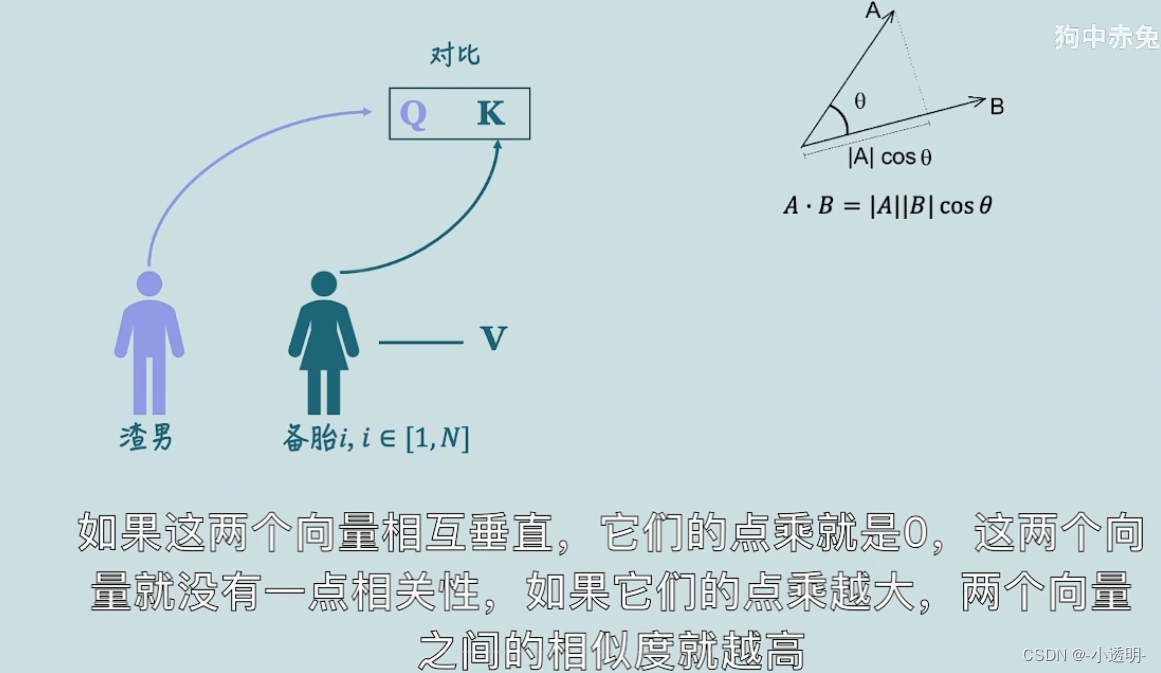
先简化到最基本的情况,对于两个样本来说,如何计算他们之间的相关性? 有这么几个步骤: 1. 先变换到一个便于度量的特征空间 2. 用一种方法将二者度量
1. 特征a和b分别经过两个不同的矩阵变换,得到embedding表达 2. embedding相乘之后,得到两者之间的相关性。 在self attention中,将所有的输入元素融合到一起,就可以得到两两间的相关性系数,即为权重系数。 注意,为了避免尺度不一致,这里需要对一个元素对其他序列元素的相关性的指标进行归一化(softmax) 具体上,如下图所示 加入权重 加入权重
对于矩阵V来说,是综合了不同的权重的内容。 总体框架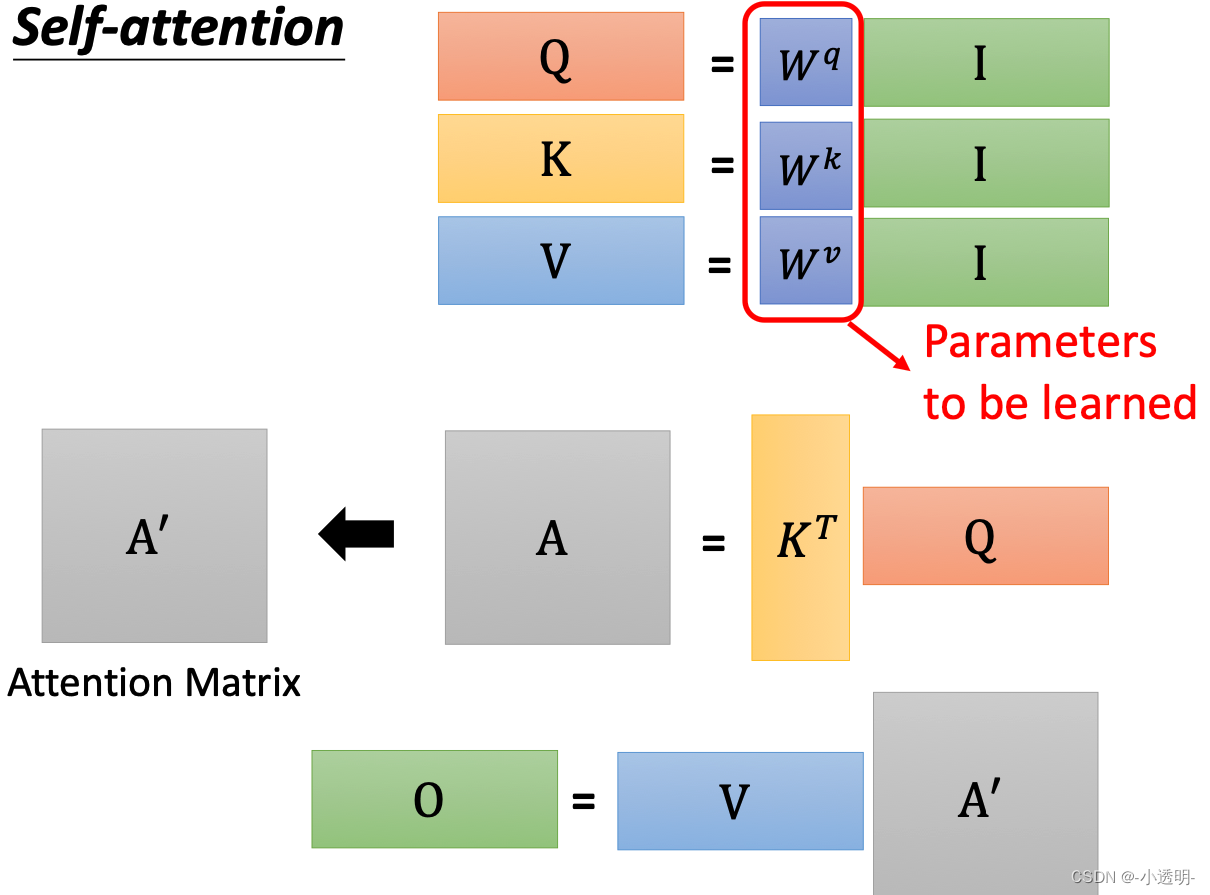 一些细节 一些细节
1. 多头注意力 2. 位置信息 多头注意力机制多头,指的是产生多组qkv矩阵,从而获得更加个性化的权重矩阵。
将图像切成若干个patch,并将其随机打乱,得到的结果对于transformer来说没有任何区别。 这显然是不正常的。所以,我们需要为每个序列中的输入加入位置信息,来补充信息。 所谓位置信息,就是生成一种和位置相关的特征编码,从而来获得更好的结果。  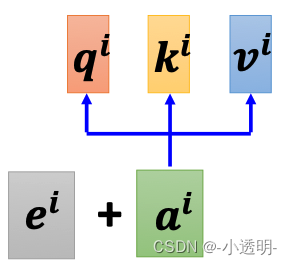
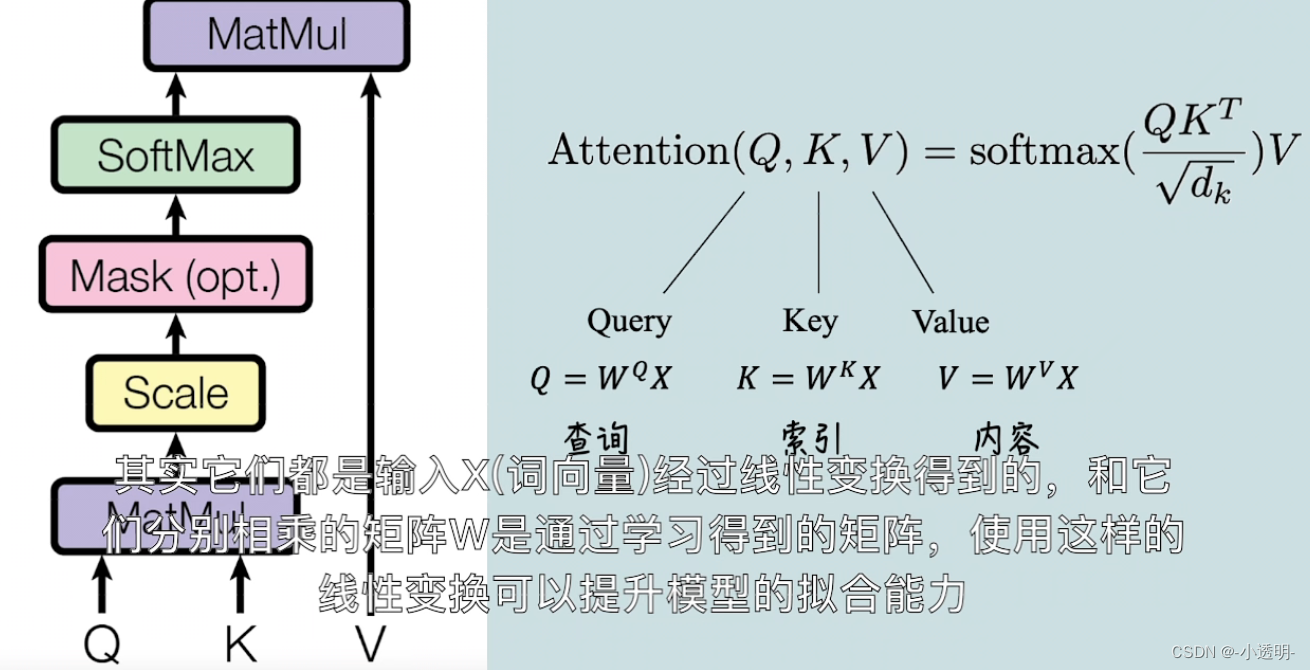
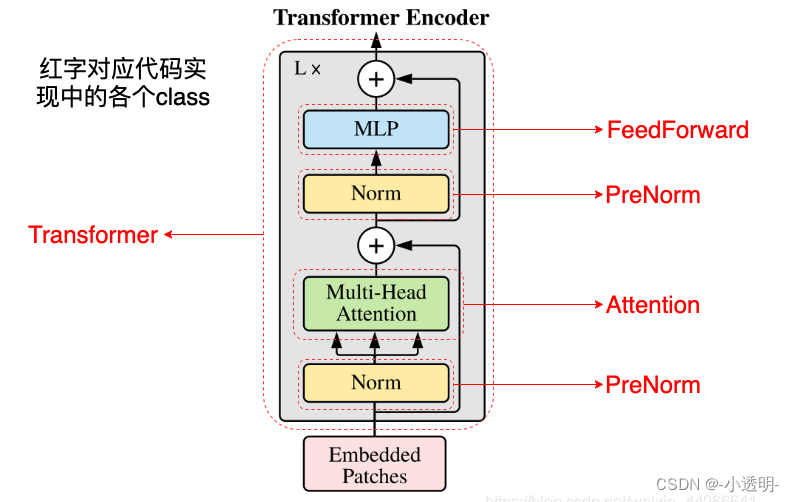
位置编码position codeing transformer在较大数据集上性能比CNN好 qkv分别可以这样理解:q当前想知道的,k键值,v-value应该输出得到的值 自注意力与卷积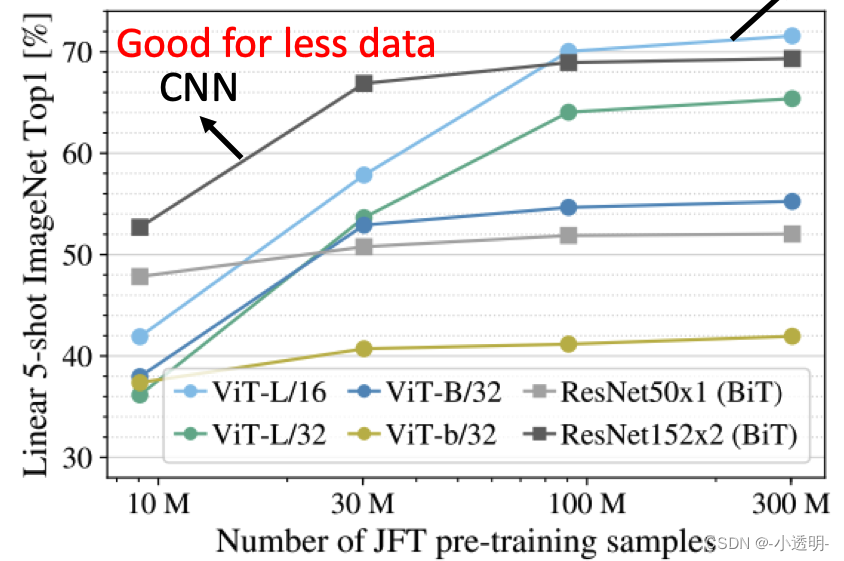 Transformer Transformer
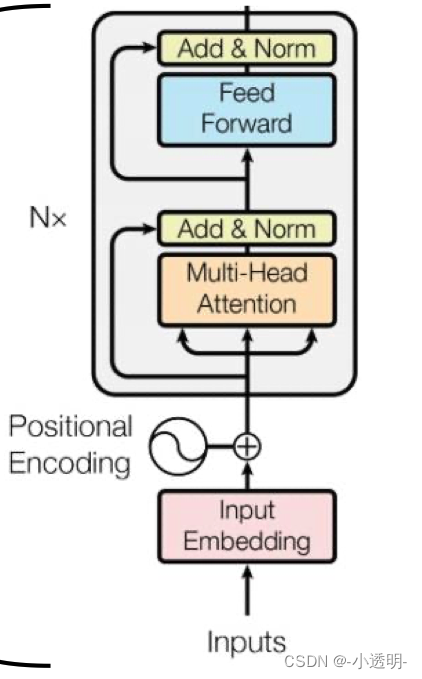
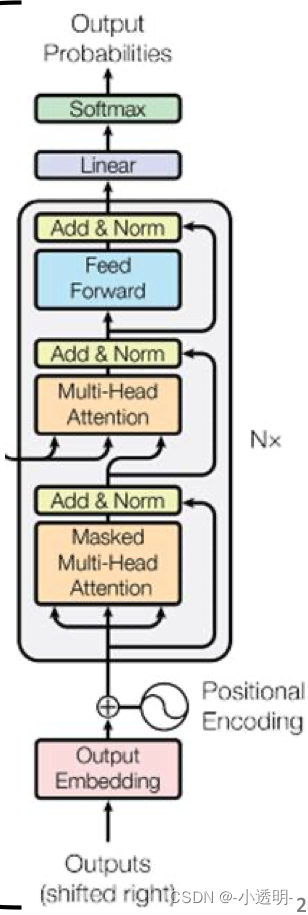
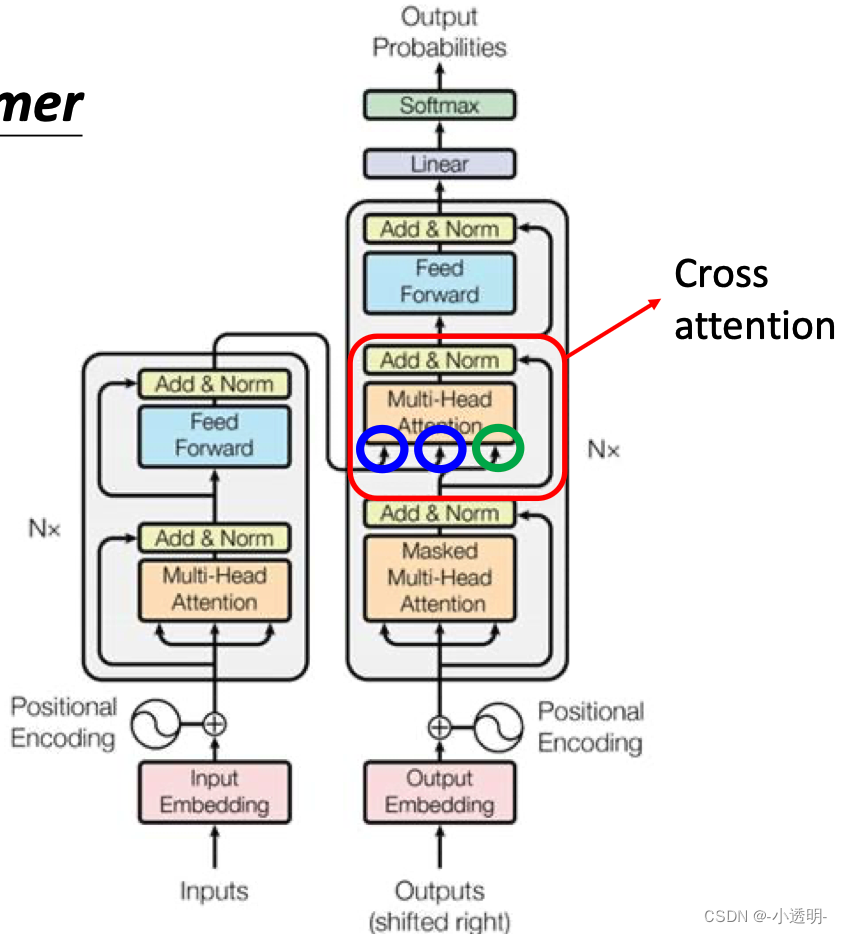
transformer是一种深度学习框架,在图像领域可以用于图像分类(ViT)以及经典图像处理任务的处理(SwinTransformer) 从功能上,transfomer分为两个部分: 1. encoder 2. decoder input embedding:可以看做一个查找表,用来获取每个单词的学习向量表示positional encoding:将位置信息嵌入向量中 编码器层:将所有输入序列映射到一个抽象的连续表示,包含了整个序列的学习信息。有两个子模块:多头注意力和一个全连接网络,两个子模块周围由残差连接,后面一次标准化层 多头注意力应用了一种特定的注意力机制:自注意力self attention 为实现自注意力,将输入分别送入三个全连接层,来创建查询向量q,键向量k,值向量v 自注意力过程: 1. 查询q映射到键k:q和v进行点乘得到一个分数矩阵,分数矩阵确定了一个单词应该怎样关注其他单词,分数越高,关注度越高。 将查询和键的维度开方将分数缩放,为了让梯度更稳定(因为乘法有可能产生梯度爆炸) 2. 然后对缩放后的得分进行softmax(归一化)《其中较高的得分会被加强,较低的得分会被抑制》,得到0-1之间的概率值。 3. 将注意力权重与值v相乘得到输出,输出向量送入线性层处理 4. 将多头注意力输出向量加到原始输入上,即残差连接。连接后输出经过层归一化后送入MLP 多头:即n组q,k,v经过同样的自注意力过程,每个自注意力过程称为一个头,输出经过线性层之前,拼接为一个向量。 理论上,没个头都会学到不同的东西。 编码层所有的操作是为了:将输入编码变为带有注意力信息的连续表示。从而帮助解码器在解码时关注输入的适当词汇信息 解码器层:输入通过嵌入层和位置编码层得到位置嵌入,然后降维位置嵌入送到第一个多头注意力层,计算解码器输入的注意力得分。与上面的多头注意力不同的是: 带有masked:为了防止解码器关注该单词之后出现的单词(即未来的标记) masked是一个与注意力得分矩阵大小相同的矩阵,有0和负无穷(经过softmax计算得到0,将当前词对后出现的词的注意力得分变为0)填充。 第一个多头注意力层输出(是值)带有掩码的向量,包含模型如何关注解码器的输入信息 第二个多头注意力层,编码器输出q,k,v ,将编码器输入和解码器输入进行匹配,让解码器决定哪个解码器输入是相关焦点。
vision transformer是用于视觉任务的transformer
除以dk(特征维度):防止梯度爆炸 ------ 缩放点积注意力 class Transformer(nn.Module): def __init__(self, dim, depth, heads, dim_head, mlp_dim, dropout=0.): super().__init__() self.layers = nn.ModuleList([]) for _ in range(depth): self.layers.append(nn.ModuleList([ PreNorm(dim, Attention(dim, heads=heads, dim_head=dim_head, dropout=dropout)), PreNorm(dim, FeedForward(dim, mlp_dim, dropout=dropout)) ])) def forward(self, x): for attn, ff in self.layers: x = attn(x) + x x = ff(x) + x return x
TYD:transformer是一个特征提取器,数据经过transformer,将不同的特征突出或下降,把“平平无奇”的数据变为“波澜起伏”的特征,送给计算机,计算机更喜欢这种“对比鲜明”的特征。 总之,多头注意力是一个模块,用于计算注意力权重并生成一个带有编码信息的输出向量,指示序列中(每个词如何关注其他所以的词)每个小图片如何关注其他小patch |
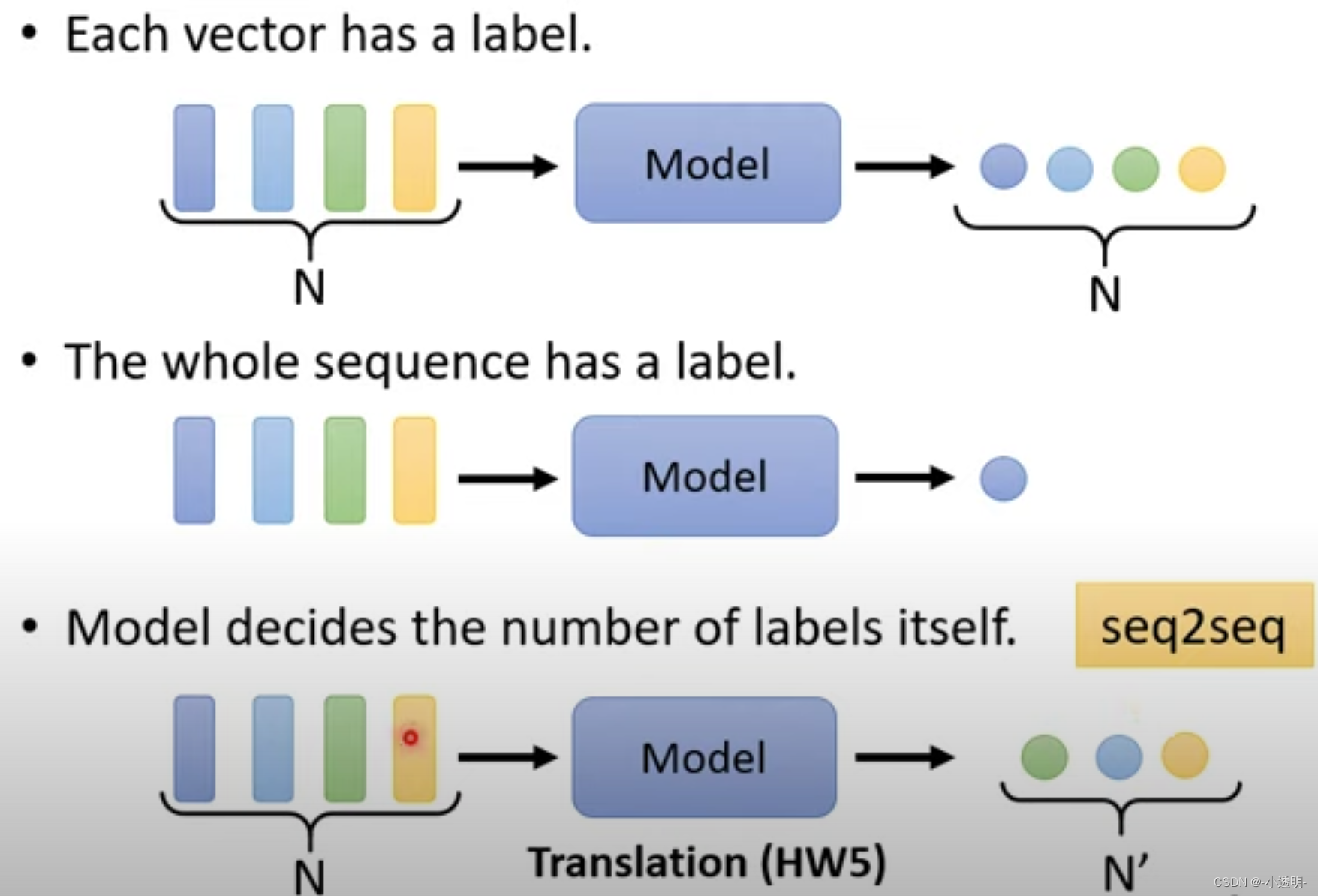 这就是seq2seq模型。
这就是seq2seq模型。
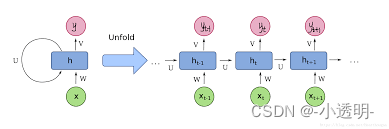 然而,即便采用RNN的方法也存在局限,因为他只能关注前后有限个序列的关联。(长序列产生较高复杂度)
然而,即便采用RNN的方法也存在局限,因为他只能关注前后有限个序列的关联。(长序列产生较高复杂度) 显然,全连接并不可靠,计算复杂度太高,容易过拟合都是他的缺点。
显然,全连接并不可靠,计算复杂度太高,容易过拟合都是他的缺点。 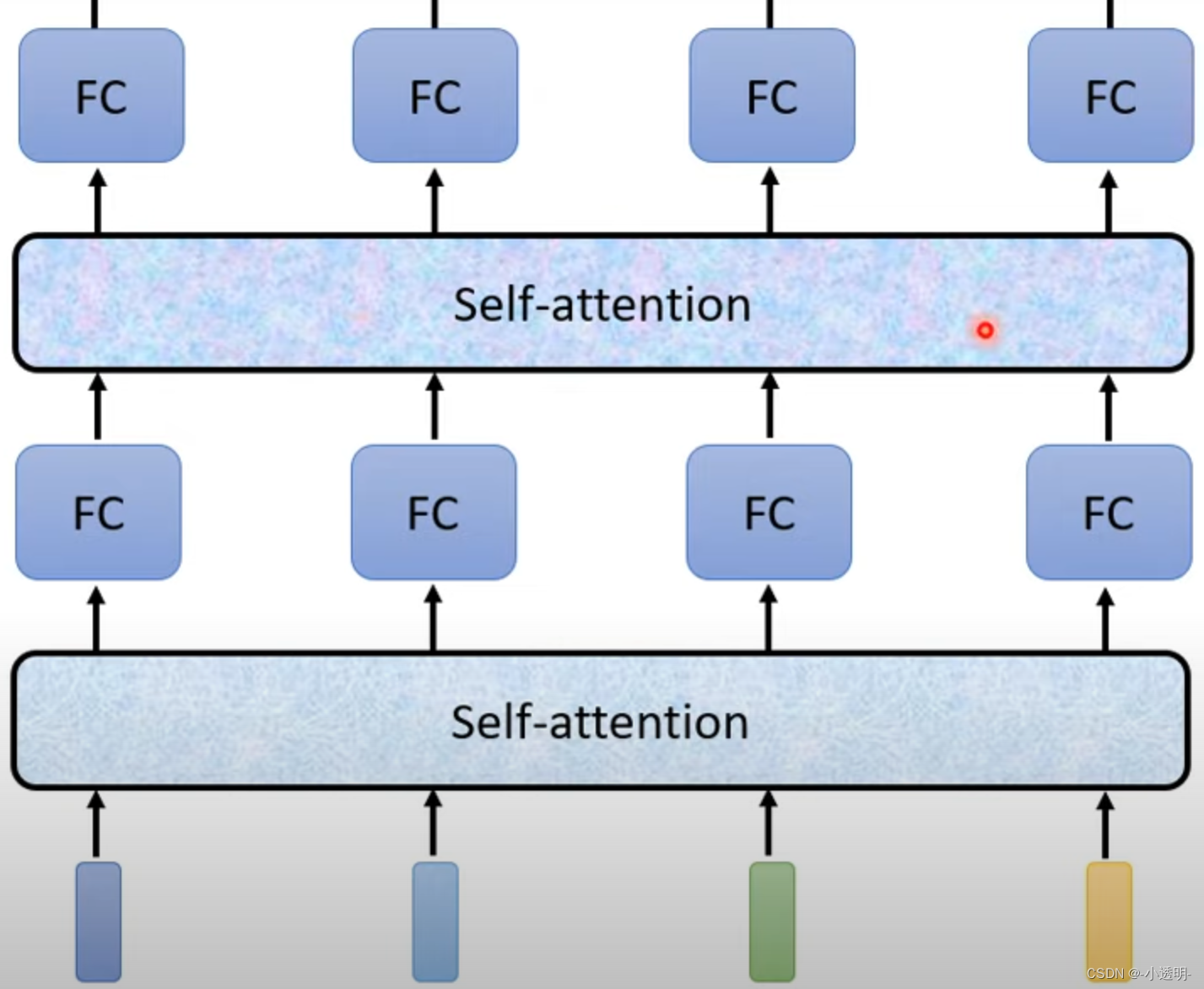 序列输入后,每个序列进入自注意力模块,计算出对应的输出
序列输入后,每个序列进入自注意力模块,计算出对应的输出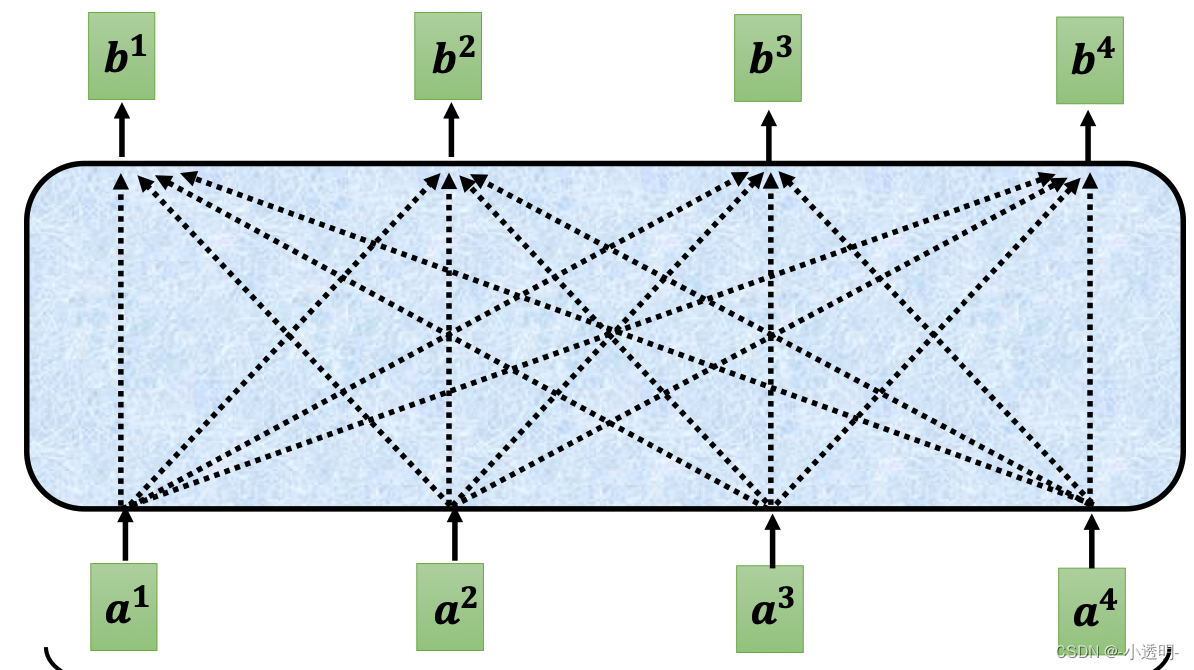 在这样的模块中,b1的结果,是综合了a1到a4的多个输入的结果。 那么如何实现这样的过程?
在这样的模块中,b1的结果,是综合了a1到a4的多个输入的结果。 那么如何实现这样的过程?  这里采用第一种方式:
这里采用第一种方式: 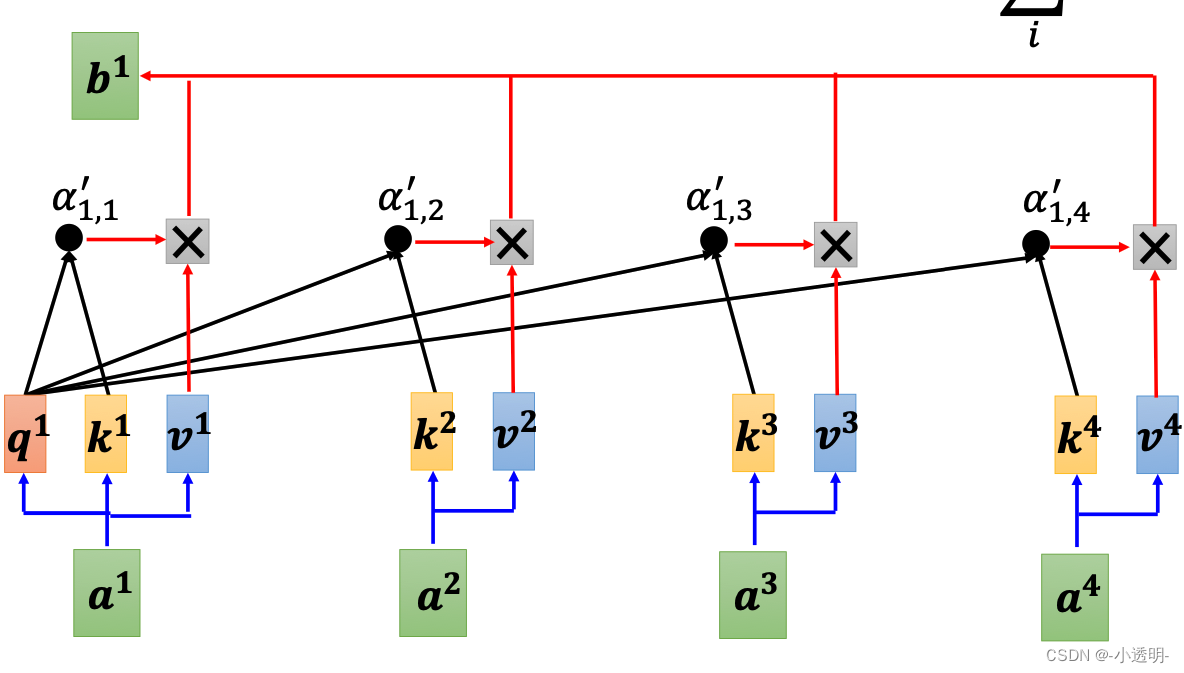 通过矩阵V来得到对应权重的输入,从而获得更好的表达。
通过矩阵V来得到对应权重的输入,从而获得更好的表达。 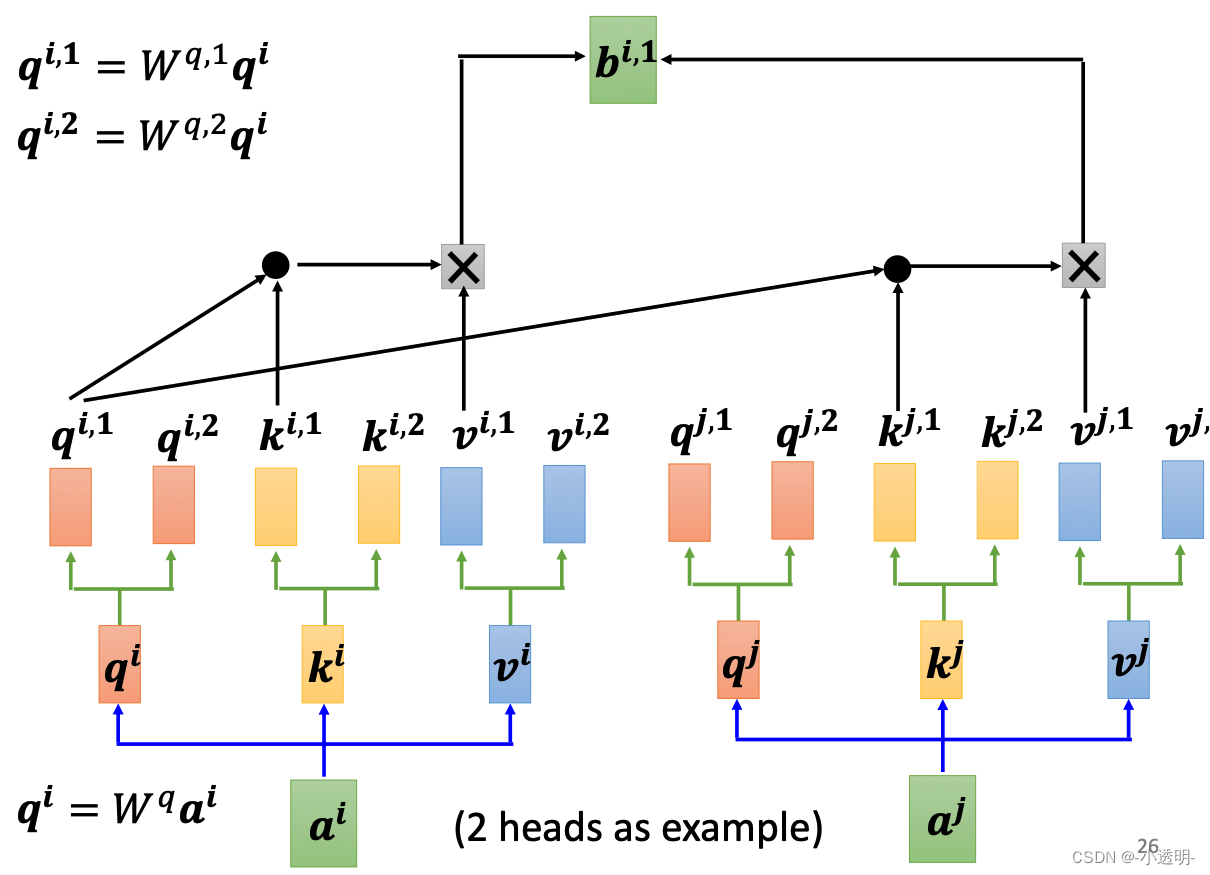
 代码
代码
【本文地址】